Interesantan problem.Po meni potrebni podaci za izracunavanje su
Ugaone brzine oba tocka. Poluprecnik tocka i osovinsko rastojanje izmedu tockova.
Tu moze da bude izvor greske zavisnosti kako tockovi nalaezu na zemlju tj. podlogu.
I naravno jedan sistem vezan za podlogu.
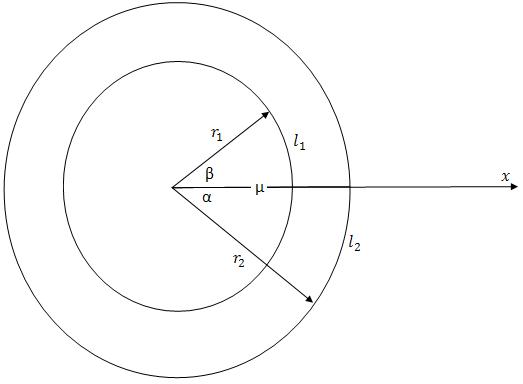
Ode je ugao beta ugao za koji ce da se okrene sporiji tocak. Taj tocak po predpostavci za neko vreme t prede put po luku l1. Dok ce se po spolnjoj kruznici kretati brzi tocak naravno u istom smeru smeru i preci ce luk l2. i opisace ugao alfa u odnosu na pocetni polozaj.
X osu ovog sistema sam stavio tako da se pre pocetka kretanja robota x osa poklapa sa osovinom koja prolazi kroz centar tockova.Mislim da je sa slike sve jasno.
Ako se krecu u suprotnim smerovima to cu da dam u narednom postu.




 "Skid steering"
"Skid steering" Registrovani: 2 ( ackopk, Java Beograd )
Registrovani: 2 ( ackopk, Java Beograd ) Re: "Skid steering"
Re: "Skid steering" Re: "Skid steering"
Re: "Skid steering"