Evo jedna shema za primer:
Ovde je bitno uvideti sledece stvari:
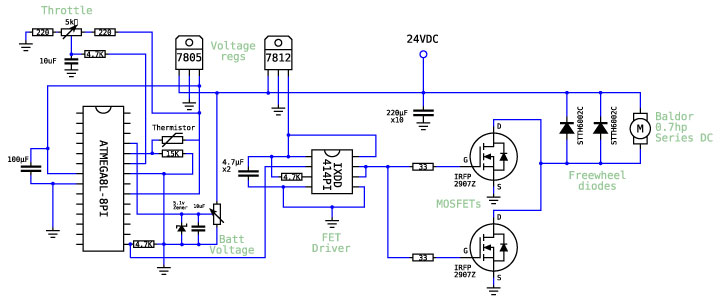
- imas dva napona u sklopu, 5V za mikrokontroler i napon za motor (12V u tvom slucaju)
- iskoriscen je poseban drajver za MOSFET (ne mora bas taj, imas dosta drugih iz "low side driver" serije, izaberi neki od bar 1A, neki od 4A je "taman", ovaj sa sheme je za 14A gate drive!!!)
- drajver obezbrduje voltage-level translaciju (sa 5V na 12V)
- drajver obezbeduje dovoljni struje za paljenje ali isto tako i gasenje MOSFET (smanjuju se gubici na tranzistoru)
- upotrebljene su brze i snazne didode paralelno sa motorom (sprecavaju se jake prekonaponske pojave)
- snazan DC bus decoupling (220uF x 10, ti stavi bar 4-5)
Frekvenciju PWM-a ces utvrditi experimentalnim putem i to se krece izmedju recimo 2kHz i 10kHz jer zavisi od induktivne karakteristike motora i njegovog jezgra.
Preniska ucestanost ce manje da greje tranzistore ali ce ti zujati motor dok ce prevelika da pocne da greje i tranzistore i sam motor zbog pojave gubitaka u samom jezgru motora (prebrzo se "zasite" metalni limovi u rotoru).
Za MOSFET mozes uzeti recimo IRFZ44N. Ako stavis dobar drajver onda nije problem da stavis i vise tranzistora paralelno kao na prilozenoj shemi.

 Pwm za elektro motor
Pwm za elektro motor


