Pročitah sve postove,neke i više puta i mogu da Vam kažem da :
-
NE znam šta pametno da VAM kažem !....zato što ste SVI.....ama baš SVI u pravu !--po mom nebitnom mišljenju.
Ne mogu nikoga posebno da izdvojim, jer je svako "injektovao"
debelu i žestoku Porciju Pametne Priče (3xP) u ovu diskusiju.
Već sam napomenuo da se
ama baš DIBIDUS ne razumem u te za mene "hieroglife" od programiranja i tabela.
Navešću samo neke stvari (neke kockice od koji sam složio kavu-takvu sliku u glavi)
sa kojima se susrečem u tom "krčkanju" (kako kaže Jovan V.) ..nafte već skoro 30 god.
Po prirodi posla susrećem se sa stvarno 33 brda razno-razne regulacije u kojima učestvuje isti broj regulatora (+koji više).
Pre 3 decenije kad smo podešavali regulatore onda se ta igrarija svela na zavrtanje-odvrtanje finih ventilčiča,
jer su regulatori bili pneumatski i radili su sa instrumentalnim vazduhom kao "Power Supply"-om,
gde se signal o vrednosti merene veličine vračao (preko bakarne cevi Ø6mm iLi Ø1/4 ") sa ponekad i 200-300 metara udaljenog
mernog mesta (na pneumatski regulator u komandnoj sali ) u obliku : pritiska vazduha sa skalom 3-15psi što odgovara opsegu 0-100%.
Ee, onda je regulator razmislio malo, pogledao koliki mu je ulaz, to uporedio sa SET-POINT-om
i na osnovu podešenih PID parametra "išamarao" te svoje " Flapere" i pneumatske relee i na svom izlazu poslao pneumatski
signal napolje (u postrojenje) na izvršni element (ventil, aktuator, pneumatski motor itd) opet sa skalom od 3-15 psi
iLi sa opsegom od 0,2-1bar (0-100%).
Tako nekao je radila regulacija pre 3 decenije sa Taylor regulatorima koji "izprilike" liće na ovakvu smart bravariju:
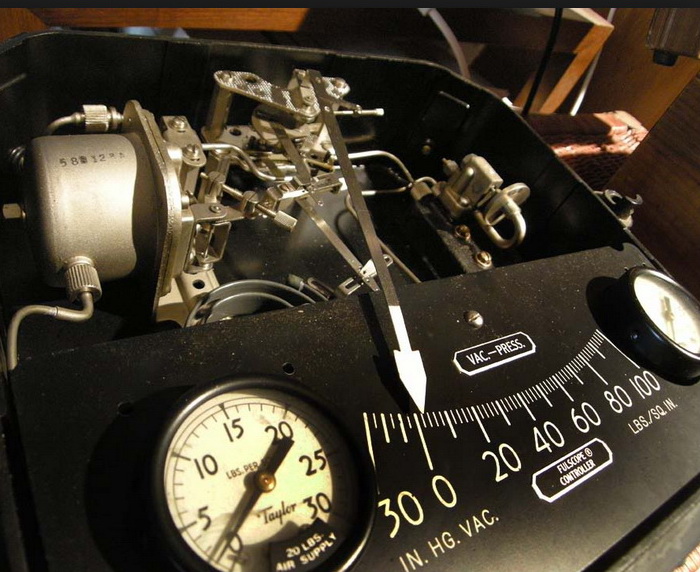
Možete misliti na šta je ličila ona rupčaga na zidu ,na ulazu u komandnu salu,
kada kroz rupetinu zida prolazi "Žbunje" od 50-100 komada paralelnih,fino "išemiranih",složenih i estetski lepo spojenih bakarnih cevi.
___________________________________________________________________________________________________
Da se vratim u 2015.-u god (ne znam ni zašto sam tako daleko otišao,a otišao sam odavno :) )
Trenutna "situlacija" je takva da : Nema šta nema ! ...........(nema daj šta daš ?? -----ima svega!--- čudo, ma čudo technike)
Ima šurnaest vrsta regulatora , pa sam hteo reći da je :
-Ta smart "Auto-Tune" pamet zastupljena samo u regulacionim krugovima u kojima ne bude velikog "Kara-BUUMMM-a"
ako pamet odkaže (zbog svoje prevelike pameti).
To su uglavnom R.Krugovi u vezi snabdevanja hidrantskom vodom, neki pod-Sistemi koji i kad ispadnu iz koloseka
ne bude nikakve havarije/požara -samo sistem ne radi , a to se da primetiti za nekoliko sekundi (Alarmi,+razne dojave o "nemanju nečega").
Za ozbiljne Reg.krugove se koriste regulatori koji su (programski) smešteni u PLC-ovima iLi u DCS-ovimima.
PLC je plc,
a DCS je onaj RITAL-orman od 300 kg, sa duplim vratima s' obe strane, visine 2 metra, i kad otvoriš vrata i duže vremena gledaš u to
što tu ima unutra ----->> onda se levom rukom počeškaš po kosi , i prvo što Ti padne na pamet je da trebaš ići Tetki da daš Lek ! :)
.....i onda 12-16 tak'ih ormana, nanizanih i međusobno fixiranih u samo jednom (1) " Equipment-Room"-u.........Eeee, da ga je**m :)
Cela ta šklopocija ima između 1500-2000 ulaznih signala + ~tu negde i izlaznih kablova, ma......
I to je samo jedan od mnogih tih "Equipment Room"-ova ,a ima ih brojeva k'o : Punoletna devojka.
________________________________________________________________________________________
Da ne dužim i smaram više , udavio sam VAS načisto,
(i oteg'o ko bosanac kad satima mulja devojku, a ONA mu kaže: Meči ga više 'ehb*te ON ! :) )
U P R A V U ___S T E ! --kada kažete da :
-smart Auto-Tune pametovanje nije baš-baš najpogodniji za sisteme u kojima
Ne sme da se desi da stvari "izmaknu kontroli",
jer će pola grada odleteti u vazduh ODMA----a okolina će da nahhebe čim svane nova zora !
Dosta su "mučne" te regulacije kad imaš grejanje/održavanje temperature u ne-izolovanom rezervoaru prečnika 32m visine 20m
a košava duva od 0-120 km/h, iLi :
-kad treba da se održi stabilnim protok u cevovodu kroz koji "roka " 300 kubika na sat nekog fluida-a
i uslov je da ne bude "udara" niti naglog polaska iLi nestanka tečnosti ,
-ima i regulacije nivoa tečnosti u koloni ( kolona je ona uspravna "Bomba" visine 50-70 m , kojoj samo Fitilj nedostaje)
regulacija je zahhhebana jer se na svaka 3-5 metara visine izdvojila druga vrsta fluida (zbog "kuvanja" )
i koji se na bočnim izvodima/ventilima "čupaju" napolje iz posude i pumpama guraju tamo gde treba,
-ili situacija kad se radioaktivnim izvorima "bombarduje" posuda u kojoj se od gore padajući slaže praškasti materijal ,
pa se meri nivo i strmina tog brdašceta unutar posude za skupljanje,
a senzor nivoa je jedan optički (višežilni) kabl u kom se dešavaju svetlucanja (scintifikacija) od prolaska zračenja kroz brdo od prašine,
sabiranjem i pravilnim rasporedom tih "scintifikacija" se dobije realno stanje količine prašine u "gvođanom " rezervoaru,
a posuda još treba i da se greje (od spolja) da se prašinčina ne ukruti i spoji , več da bude rastersita/homogena,
..ma idi...100 Q-a i vrsta Regulatora, -sve u svemu "Ringišpil" -raznih Špecija,
Naravno je danas sve u opsegu od 4-20mA + DATA prenos, bi-direkcionalno ( Mod-Bus, Profi-Bus,etc,etc)
po istim tim kablovima (2 žice-po Loop-u, iLi 2 provodnika na 20,30 --100 elemenata/transmitera/ventila u paraleli ).
...ali ja više nemam pojma šta je PID, FUZY, ON-OFF regulacija,.....čiste "Čuke" nemam....
sve je postalo jedna velika MIXTURA svega + svačega.....
IZVINITE na dužini post-a,
Ako neko misli da u nečemu mogu da mu barem malo pomognem,.....na IZVOLTE-sam,
(verujem da imate utisak da je veliko pitanje dal uopšte ikome mogu u ičemu da pomognem) :)
pOz
[Ovu poruku je menjao Trick Fix dana 03.01.2015. u 04:51 GMT+1]




 Re: Podesavanje PID parametara primenom Ziegler-Nichols metode
Re: Podesavanje PID parametara primenom Ziegler-Nichols metode
 Registrovani: 3 ( 33rf, miki069, svojnasvome )
Registrovani: 3 ( 33rf, miki069, svojnasvome )
 , treba samo zagrevanje do jedne temperature.
, treba samo zagrevanje do jedne temperature.
 Re: Podesavanje PID parametara primenom Ziegler-Nichols metode
Re: Podesavanje PID parametara primenom Ziegler-Nichols metode